Um robô, que tem um ímã em sua base, se desloca sobre a superfície externa de um cubo metálico, ao longo de segmentos de reta cujas extremidades são pontos médios de arestas e centros de faces. Ele inicia seu deslocamento no ponto P, centro da face superior do cubo, segue para o centro da próxima face, converte à esquerda e segue para o centro da face seguinte, converte à direita e continua sua movimentação, sempre alternando entre conversões à esquerda e à direita quando alcança o centro de uma face. O robô só termina sua movimentação quando retorna ao ponto P. A figura apresenta os deslocamentos iniciais desse robô.
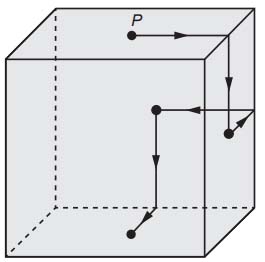
A projeção ortogonal do trajeto descrito por esse robô
sobre o plano da base, após terminada sua movimentação,
visualizada da posição em que se está enxergando esse
cubo, é